Déplacements du robot
Le robot se déplace à l'aide de deux moteurs M1 et M2 qui commandent les 2 roues circulaires.
Les commandes de Pilotage qui permettent de déplacer le robot sont :
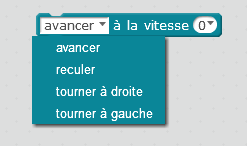
La vitesse est un nombre entier compris entre -255 et 255.
Avancer avec une vitesse égale à 0 conduit à l'arrêt du robot.

On peut donc choisir des vitesses différentes pour les deux moteurs, ce qui conduit à une trajectoire non rectiligne du robot.
Faire déplacer le robot sur un contour en forme de carré.
 Ecrire un programme qui permet au robot de parcourir un contour en forme de carré.
Ecrire un programme qui permet au robot de parcourir un contour en forme de carré.
Indication :
- Pour faire tourner le robot à 90°, il faut utiliser la commande
 ou
ou  , suivie de la commande
, suivie de la commande  à étalonner selon la vitesse de rotation
à étalonner selon la vitesse de rotation  choisie pour obtenir un angle de rotation proche de 90°.
choisie pour obtenir un angle de rotation proche de 90°.
Déplacement en forme de cercle
Ecrire un programme qui permet au robot de parcourir un cercle.
Indication :
- Il faut utiliser les commandes
 et
et  avec des puissances différentes sur chaque moteur et observer comment la différence entre les deux puissances influent sur le rayon du cercle décrit et sur le sens de rotation du robot.
avec des puissances différentes sur chaque moteur et observer comment la différence entre les deux puissances influent sur le rayon du cercle décrit et sur le sens de rotation du robot.
Déplacement en forme de spirale rectiligne
Ecrire un programme qui permet au robot de parcourir une zone rectangulaire en décrivant une spirale composée de déplacements rectilignes du robot de longueur décroissante et de rotation à 90°.
Indications :
- Il faut utiliser une variable pour la longueur l d'un segment courant de la spirale qui se traduira par la commande
- Il faut bien sûr utiliser une boucle

- L'évolution de la longueur courante du segment de la spirale peut se faire par une soustraction ou bien par la multiplication par un coefficient compris entre 0 et 1.
- Pour faire tourner le robot à 90°, il faut utiliser la commande ou , suivie de la commande à étalonner selon la vitesse de rotation choisie pour obtenir un angle de rotation proche de 90°.
- La condition de fin du déplacement peut se faire lorsque la longueur courante du segment de la spirale est inférieure ou égale à une longueur donnée, ou bien inférieure ou égale à une fraction de la longueur initiale.